









Pololu 3pi+ 2040 Robot
Parametry
Opis produktu
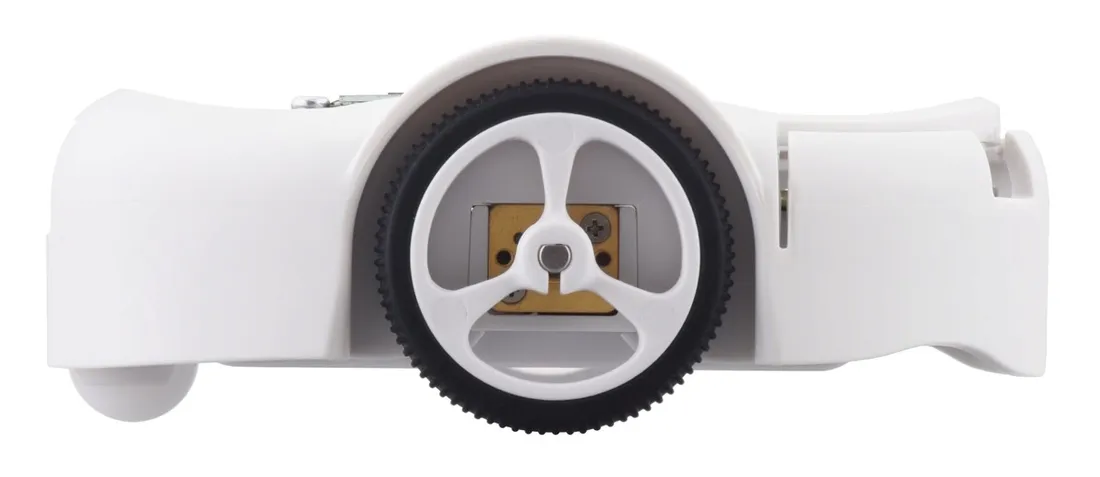
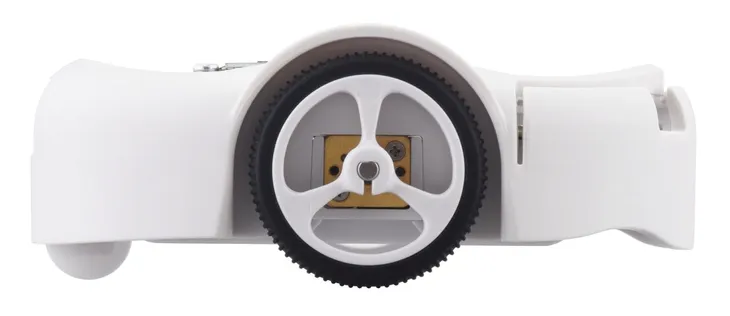
Pololu 3pi+ 2040 Robot - robot mobilny z RP2040 (Standard Edition, zmontowany)
Opis
Pololu 3pi+ 2040 to zmodernizowana wersja popularnego robota mobilnego Pololu. Został oparty o mikrokontroler Raspberry Pi RP2040 (taki jak w Raspberry Pi Pico), 32-bitowy dwurdzeniowy Arm Cortex-M0+ pracujący z częstotliwością 125 MHz, który można programować w językach C, C++, Arduino lub Python. 3pi+ 2040 ma 16 MB (128 Mbit) pamięci flash, która jest dostarczana z preinstalowanym interpreterem MicroPython, dzięki czemu można od razu rozpocząć pracę, podłączając go do portu USB C i edytując dołączone przykładowe programy Python.
Płytka sterująca wyposażona została w dwa sterowniki silników, enkodery oraz elastyczny system zasilania. Wersja Standard Edition porusza się dzięki 2 silnikom Pololu 30:1 MP, a zasilana jest przez cztery baterie AAA.
Uwaga!
Zestaw nie zawiera baterii AAA niezbędnych do uruchomienia robota. Należy je zakupić oddzielnie.
Robot wyposażony został w pięć czujników odbiciowych umieszczonych na spodzie platformy, dwa czujnik zderzeniowe z przodu robota oraz czujniki IMU (akcelerometr, żyroskop, magnetometr). Poza tym na płytce umieszczono diody sygnalizacyjne, przyciski użytkownika, buzzer oraz wyświetlacz OLED.
Mikrokontroler sterujący robotem wyposażony został w interpreter MicroPython i może być programowany przy pomocy języka Python. Użytkownicy mogą również programować robota w języku C/C++. Do obsługi poszczególnych układów robota dostępne są bogate i łatwe w obsłudze biblioteki Pololu Library.
Pełna dokumentacja oraz instrukcja obsługi dostępna jest na stronie produktu.
Robot dostępny jest w kilku wersjach zarówno w pełni złożony, jak i jako zestaw do samodzielnego montażu.
Wersja Silniki Prędkość maksymalna Komentarz
Standard Edition, zmontowany 30:1 MP 6V 1,5 m/s dobre połączenie szybkości i sterowalności
Standard Edition, do montażu
Turtle Edition, zmontowany 75:1 LP 6V 0,4 m/s najdłuższa żywotność baterii, najłatwiejsza do kontrolowania, dobra dla robotów rojowych lub kursów wprowadzających do robotyki
Turtle Edition, do montażu
Hyper Edition, zmontowany 15:1 HPCB 6V 4 m/s bardzo szybki i trudny do kontrolowania, łatwy do uszkodzenia, zalecane dla zaawansowanych użytkowników
Hyper Edition, do montażu
Właściwości
- Mikrokontroler: Raspberry Pi RP2040 125 MHz, 256 kB RAM, 16 MB Flash
- Sterownik silnika: 2 x DRV8838
- Napęd: 2 x silnik Pololu 30:1 MP 6V
- 2 x Enkodery inkrementalne
- Układ LSM6DSO (akcelerometr + żyroskop)
- Magnetometr LIS3MDL
- 2 czujniki zderzeniowe
- 5 czujników linii
- Wyświetlacz OLED 128x64 px
- Buzzer
- 3 przyciski i 3 LED-y użytkownika
- Zabezpieczenie przed odwróconą polaryzacją napięcia
- Napięcie robocze: 3 V do 7 V
- Wymiary: 97 x 96 x 36 mm
- Waga: 100 g (bez baterii)